Робототехнические комплексы с применением системы автоматизированного моделирования в режиме реального времени
Подробности- Подробности
- Опубликовано 24.10.2015 14:59
- Просмотров: 2582
 Новая концепция робототехнических комплексов с применением системы автоматизированного моделирования в режиме реального времени
Новая концепция робототехнических комплексов с применением системы автоматизированного моделирования в режиме реального времени
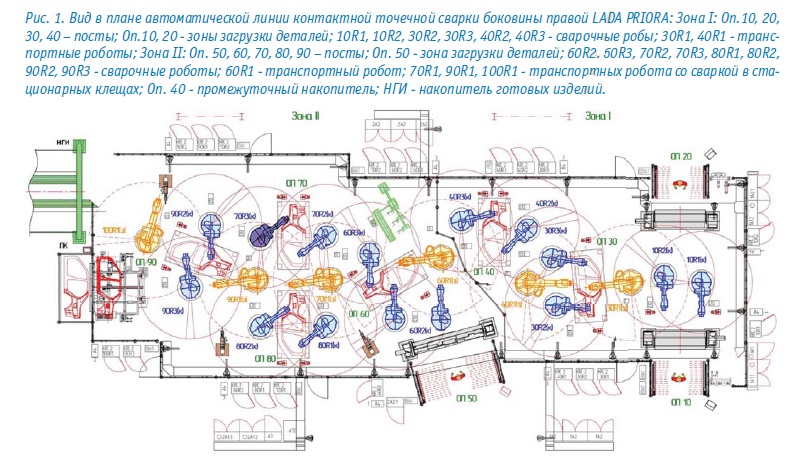
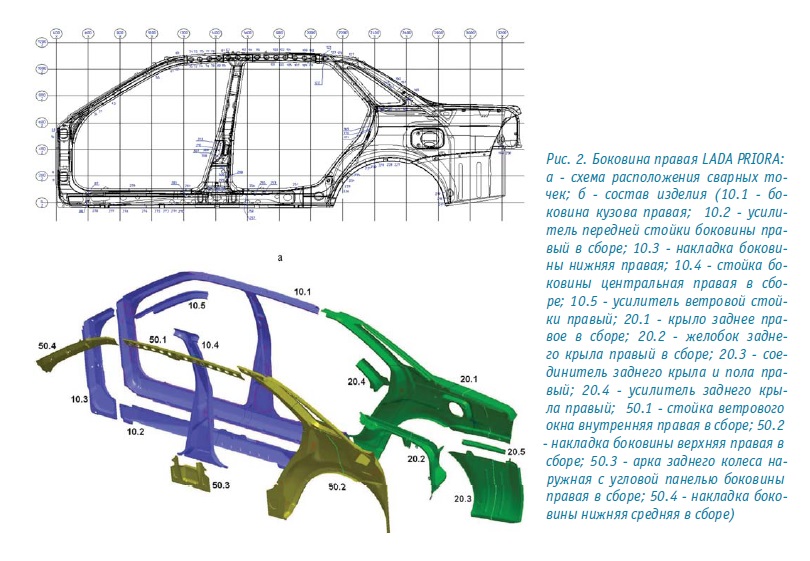
При создании робототехнических комплексов для изготовления автомобилей LADA KALINA и LADA PRIORA специалистами производства технологического оборудования и оснастки (ПТОО) ОАО «АВТОВАЗ» была реализована качественно новая, для отечественного автомобилестроения, концепция «Roboter Garten» («Сад роботов»), в соответствии с которой, посты не связаны жёстким транспортом, а передача изделия с поста на пост, осуществляется транспортными роботами. Применение такой концепции в современной автомобильной промышленности, позволяет на одном и том же оборудовании производить несколько моделей автомобилей. Примером оборудования спроектированного и изготовленного в ПТОО по концепции «Roboter Garten» является автоматическая линия контактной точечной сварки (рис. 1) боковины правой LADA PRIORA (ВАЗ 2170), которая предназначена для сварки изделия по 357 точкам сварки (рис. 2, а), с производительностью 40 изделий в час. В состав изделия - боковины правой входят 14 деталей и узлов (рис. 2, б). При реализации концепции «Roboter Garten» возникает необходимость компактного размещения большого количества роботов в рамках планировочных площадей заказчика. При этом все большую актуальность приобретает задача анализа роботизированных комплексов по следующим критериям: достижимости роботами сварных точек; отсутствию столкновений между роботами, сварочными клещами, оснасткой и автомобильными деталями; обеспечению заданного времени цикла работы линии. Для проверки соответствия проектируемого оборудования вышеперечисленным условиям в ПТОО ОАО «АВТОВАЗ» используется программный пакет ROBCAD из линейки продуктов Tecnomatix компании Siemens PLM Software в котором:
• выполняется детальный анализ достижимости сварных точек, применяемой оснастки, сварочных клещей, расположения манипуляторов;
• осуществляется построение траекторий движения манипуляторов и вычисляется время цикла сварки на каждом посту;
• выявляются проблемы, возникающие при сварке точек.
Все это позволяет провести подготовку и проверку производственного процесса на очень ранней стадии проектирования, оптимизировать использование оборудования, точно рассчитать времена циклов и в результате выполнить пусконаладочные работы существенно быстрее.
При этом базовая функциональность пакета ROBCAD предоставляет следующие возможности:
- геометрическое моделирование и определение кинематики компонентов;
- расположение компонентов и их отношения (присоединение друг к другу);
- анализ столкновений;
- планирование движения;
- создание траекторий движения;
- последовательность операций, расчет времени цикла;
- ядро для Оff-Line программирования;
- калибровка геометрии в ячейке относительно реального размещения.
Для разработки и оптимизации точечной контактной сварки в трехмерной графической среде применяется модуль ROBCAD/Spot, предоставляющий следующую функциональность:
- импорт сварных точек;
- проекция точек на деталь и определение их атрибутов;
- ориентирование клещей в точках сварки;
- создание сечений и интерактивная работа с ними;
- подбор клещей (по геометрии и атрибутам);
- подбор взаимного расположения роботов и детали;
- создание промежуточных точек траектории для обхода препятствий;
- оптимизация траектории и времени цикла сварки.
Для разработки и анализа технологических процессов дуговой сварки и Оff-Line программирования роботов применяется модуль ROBCAD/ Arc, который включает:
- создание швов по геометрии детали;
- определение параметров сварки, ориентирование инструмента и проверка достижимости;
- определение процедуры поиска начала шва;
- создание промежуточных положений для обхода препятствий;
- определение последовательности сварки швов;
- подбор положения подвеса робота;
- подбор положения позиционера (в том числе динамический).
Для создания непрерывных траекторий в таких процессах как лазерная сварка и резка, водяная резка, раскройка, нанесение клея применяется модуль ROBCAD/ Cut and Seal, который предоставляет следующие возможности:
- автоматическое создание траектории по набору поверхностей или кривых;
- автоматическое определение типа движения по траектории; - создание макросов;
- компенсация размера инструмента;
- автоматическая ориентация для предотвращения столкновений.
Большинство идентифицированных, в процессе работы пакета ROBCAD, проблем с достижимостью точек и столкновениями роботов с оснасткой и деталями устраняются в процессе проектирования путем:
- изменения геометрии оснастки;
- изменения геометрии инструмента робота;
- изменения положения робота относительно оснастки и детали;
- переноса точек сварки с одной операции на другую.
Для обеспечения возможности моделирования роботизированного оборудования с применением новой гаммы отечественных промышленных роботов ПТОО ОАО «АВТОВАЗ» в настоящее время проводятся работы по включению роботов серии TUR в библиотеки пакета ROBCAD. Одним из первых в библиотеку пакета ROBCAD был включен промышленный робот TUR150 для проверки возможности замены на операции 70 (56 сварочных точек) автоматической линии сварки боковины правой (рис. 1) робота 70R3 (ПР150), изготовленного по лицензии фирмы KUKA (Германия), на TUR150 с новой моделью сварочных клещей конструкции ПТОО [3] (рис. 3).

Принятые при моделировании автоматической линии в режиме реального времени оперативные технические решения позволили устранить все выявленные коллизии еще на этапе проектирования, что позволило за два дня провести модернизацию действующей автоматической линии. Безупречная работа модернизированной автоматической линии работающей в массовом производстве, подтвердила эффективность принятых проектных решений. Проектирование и изготовление роботизированных комплексов с использованием математических моделей деталей кузова и пакета ROBCAD позволило значительно сократить сроки подготовки нового и модернизации действующего оборудования в ПТОО ОАО «АВТОВАЗ», а так же повысить его качество и эксплуатационный ресурс.